Segundo Branco e Albuquerque (2025), a visão computacional vem se consolidando como uma ferramenta estratégica para aumentar a segurança e eficiência operacional no setor ferroviário, especialmente em atividades críticas como a identificação automática de placas de veículos, contêineres, vagões e outros elementos móveis (JIANG, 2021; KUMAR; HARSHA, 2024).
As aplicações estendem-se nas áreas de segurança, como por exemplo a detecção precoce de anomalias com algoritmos avançados (WANG et al., 2019) ou na redução de falhas humanas por meio da automatização de inspeções (JAMSHIDI et al., 2017), bem como no acréscimo da produtividade de processos logísticos pelo rastreamento por visão computacional (MARIO; MEZHUYEV, 2023).
PUBLICIDADE
Alguns exemplos de aplicação, como na Alemanha (Deutsche Bahn), quando da detecção de obstáculos e acionamento de freios (DB, 2024), no Japão com o uso de aprendizado profundo para inspeção durante operação (LI; DOH, 2022) ou ainda aqui non Brasil (Vale) através do monitoramento inteligente na Estrada de Ferro Carajás (VALE, 2025), merecem destaque.
Contudo, para assegurar uma implantação eficaz das infraestruturas de visão computacional (portais, cancelas, câmeras, etc.), é essencial realizar uma análise prévia, via simulação georreferenciada, para determinar os locais mais estratégicos ao posicionamento dos sensores e pontos de controle. Essa abordagem visa que, cada veículo, contêiner ou vagão passe dentro da área geométrica ideal de leitura da placa, conforme mapeado pela simulação. Estudos indicam que modelos ópticos e simulações em ambiente controlado são capazes de definir com precisão essa zona de detecção ideal, aumentando significativamente a taxa de acerto do sistema e evitando áreas cegas ou fora do foco operacional (MCRADEMEYER; BOOYSEN; BARNARD,2018).
Além disso, frameworks de co-simulação integram ferramentas de escoamento de tráfego com ambientes virtuais de visão computacional, a fim de avaliar impactos de posicionamento na performance operacional e identificar pontos de gargalo, por processamento ou esperas, permitindo ajustes antes da instalação física dos elementos de controle (PRADHAN et al., 2024), como por exemplo, identificar a distância necessária entre etapas consecutivas para que se formem áreas de estacionamento intermediário suficientemente grandes a fim de que, ações subsequentes possam ser efetuadas sem prejudicar o fluxo contínuo da operação mesmo em época e/ou horários de maior frequência de chegada dos clientes.
A Figura 1 abaixo ilustra a situação em que, após a identificação da placa do veículo e container - por visão computacional (OCR : Optical Character Recognition) cancelas liberam ou reprovam, em casos de falta de agendamento, falha de vínculo carga/caminhão, etc, o acesso ao pátio intermediário de atendimento complementar.
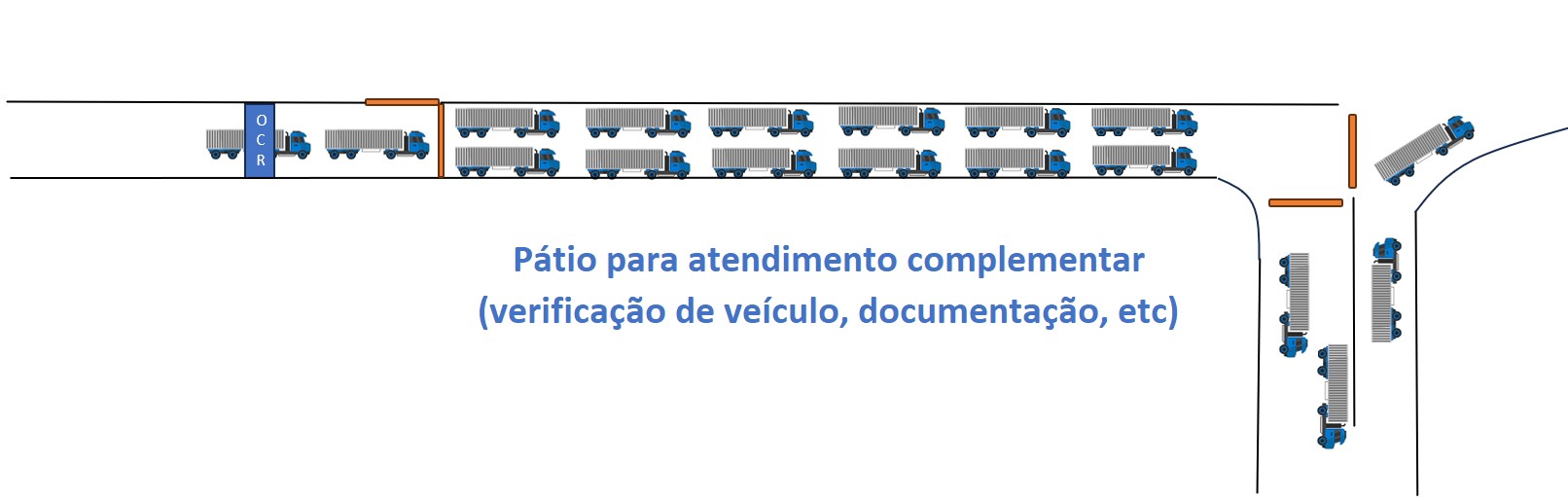
Figura 1. Desenho esquemático de localização de Portal OCR em sistema de chegada de veículos
Nesse pátio, ocorrem as demais verificações do caminhão, motorista, documentação e, portanto, o tempo que será demandado nestas atividades é maior do que aquele durante as leituras no OCR.
O gráfico 1 demonstra como se comporta a quantidade de veículos em fila conforme varia o intervalo entre as chegadas consecutivas e, em 8 perfis de tempo de atendimento. Pode-se então perceber quais deles mantem-se funcionais, ou seja, continuam permitindo a acomodação dos veículos em espera utilizando apenas o espaço existente, sem bloquear a entrada do portal.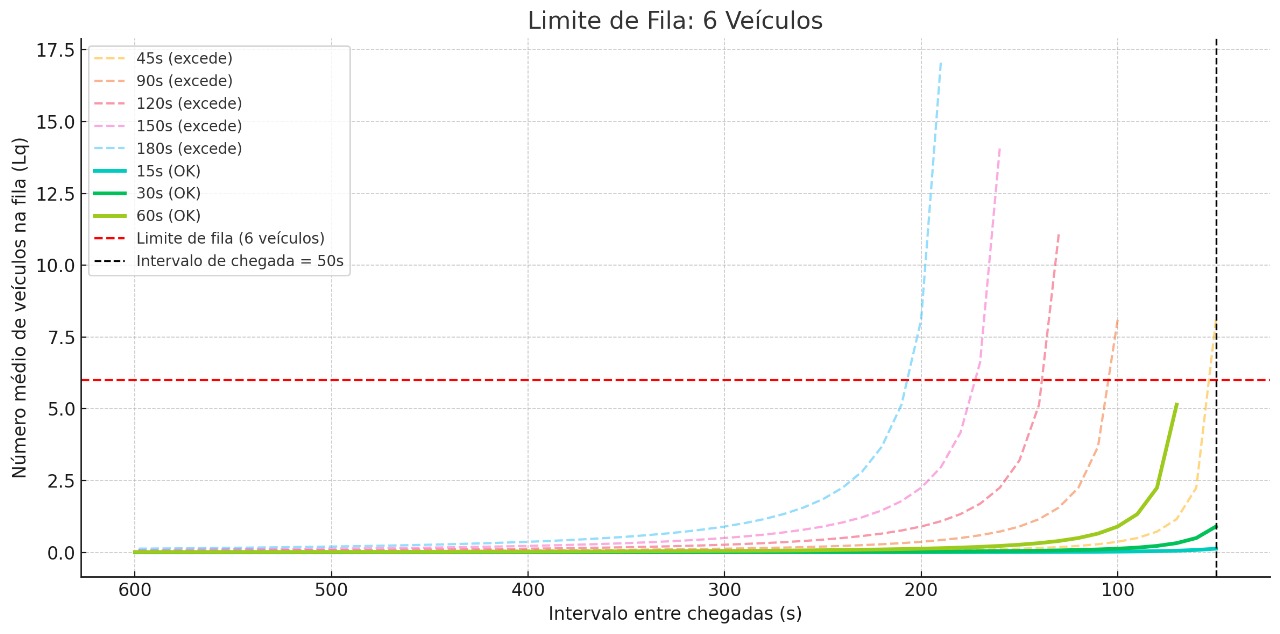
Gráfico 1. Curvas de atendimento e consequentemente formação de filas em função dos intervalos consecutivos de chegada
Assim, a localização do Portal OCR promove, uma maior ou menor capacidade de acomodação dos veículos, antes e após ele, de forma associada aos tempos de atendimento, frequência de chegada e tipos de caminhões, tendo, portanto, importantíssimo papel na eficiência do sistema. Para tal, a sua correta posição georreferenciada que, subsidiará as obras civis necessárias à implantação, deve ser determinada por ensaios de simulação logística para garantir a correta funcionalidade do sistema com os resultados pretendidos.
 *Dennis Caceta (esq) é engenheiro especializado em Gerenciamento de Projetos (USP/Leeds), Estatística para Análise de Negócios (FCAV/Rice) e mestrando em Pesquisa Operacional (ITA/UNIFESP).
*Dennis Caceta (esq) é engenheiro especializado em Gerenciamento de Projetos (USP/Leeds), Estatística para Análise de Negócios (FCAV/Rice) e mestrando em Pesquisa Operacional (ITA/UNIFESP).
**Raphael Fernandes (centro) é graduado em Administração e especialista em Engenharia de Software e Gestão e Engenharia de Produtos e Serviços.
***Kawê Branco (dir) com formação é graduado em Gestão Portuária e pós-graduação em Gestão de Processos Logísticos.
Referências:
BRANCO, Kawe Aggio; ALBUQUERQUE, Raphael Fernandes de. Otimização da segurança ferroviária através de sistemas de visão computacional: desafios e soluções. Orient. Fernando Rossini. 2025. Trabalho de Conclusão de Curso (Pós-Graduação em Engenharia e Arquitetura de Software) – Fundação Instituto de Administração, São Paulo, 2025.
DB. Relatório Intercalar Integrado. Deutsche Bahn, 2024.
JAMSHIDI, A. et al. A big data analysis approach for rail failure risk assessment. Risk Analysis, 2017.
JIANG, T. Development and Application of a Vision-Based System. NTNU, 2021.
KUMAR, A.; HARSHA, S. Defect detection in railways using machine vision. India, 2024.
LAMAS, P.; CARAMÉS, T.; CASTEDO, L. Towards the Internet of Smart Trains. Spain, 2017.
LI, J.; DOH, I. Railway Defect Detection Method. Malaysia, 2022.
MARIO, B.; MEZHUYEV, V. Predictive Maintenance for Railway Domain. Austria, 2023.
MCRADEMEYER, M. J.; BOOYSEN, M. J.; BARNARD, D. Factors that influence the geometric detection pattern of LPR cameras. 2018.
PRADHAN, A. et al. An integrated SUMO–CARLA framework for vehicle perception research. arXiv, 2024.
VALE. Estrada de Ferro Carajás e uso de IA na segurança. 2025.
WANG, M. et al. Detection of Surface Defects on Railway Tracks Based on Deep Learning. China, 2019.