
 Por Mauricio Peixoto Pacheco da Rocha
Por Mauricio Peixoto Pacheco da Rocha
• Com a crescente monitoração de diversas atividades, a quantidade de informação disponível para análise tem aumentado significativamente, propiciando um novo paradigma de descoberta de padrões apoiado em algoritmos de data mining. Na área de navegação marítima, graças a introdução e uso obrigatório do AIS pelos navios de maior porte, não é diferente. Enormes quantidades de dados de posição podem ser facilmente acumulados sobre a movimentação dos navios numa região. Com a recente integração do AIS com satélite e a interconexão de fontes de dados via Internet, não só a movimentação costeira mas também boa parte da movimentação global de navios também pode ser analisada em detalhe para identificar padrões recorrentes, acompanhar e estimar movimentações futuras e detectar comportamentos atípicos. Esse estudo de caso investiga uma possibilidade de aplicação de um desses algoritmos: o TraClus através de uma extensão implementada no Sistema de Tráfego Aquaviário (STAQ) desenvolvido pela CASH Computadores e Sistemas.
PUBLICIDADE
Suponhamos uma base de dados contendo os relatos de posição AIS acumulados ao longo de um período numa região de interesse. Selecionemos as sequencias de posições de navios de grande porte entrando na Baia de Guanabara e atracando no Porto do Rio de Janeiro. Considerando o conjunto de trajetórias descritas por esses rastros, pergunta-se: existe algo em comum entre elas? Seria possível simplificar o complexo conjunto de trajetórias substituindo-o por um punhado de outras linhas bem mais simples capazes de capturar a tendência geral dos deslocamentos desses navios na baia? Qual o caminho mais comum ou “rota representativa” que um navio desses segue da entrada da baia até o porto e qual a velocidade média ao longo dos principais trechos? Considerando essa “rota representativa”, qual o tempo estimado que um novo navio compatível com os navios estudados e que acaba de chegar à entrada da baia deve levar até o porto?
Em Data Mining [1], algoritmos de clustering em geral procuram agrupar conjunto de dados em múltiplos grupos ou clusters tal que objetos num cluster tem uma alta similaridade, mas são distintos de objetos em outros clusters. Entre esses algoritmos podemos destacar os algoritmos de trajectory clustering que operam sobre trajetórias ou partes de trajetórias.
O TraClus [3] é um algoritmo bastante conhecido na área e já com diversas variações propostas, inclusive uma recente para rotas de navios [4]. Aqui, nos deteremos sobre sua formulação original de 2007 e no final, introduziremos uma pequena extensão.
Em linhas gerais, o TraClus recebe como entrada um conjunto de trajetórias, simplifica e particiona essas trajetórias em segmentos, descobre clusters de segmentos e finalmente retorna um conjunto simplificado de trajetórias representativas calculadas sobre cada um dos clusters de segmentos. Ele é baseado no algoritmo consagrado DBSCAN [2] e, como este último, também encontra clusters extensos, pois ele inclui tanto os segmentos diretamente quantos os indiretamente atingíveis a partir do segmento identificado como núcleo em cada cluster.
Uma vantagem muito interessante desse algoritmo é que ele é capaz de identificar subtrajetórias, ou seja, porções das trajetórias suficientemente próximas, ainda que as trajetórias não sigam próximas o tempo todo. Na verdade, ele particiona previamente as trajetórias e opera sobre seus segmentos de pares de pontos. Depois de reunir os segmentos em clusters, ele traça uma trajetória representativa composta de novos pontos calculados usando uma linha de varredura perpendicular à direção média dos segmentos reunidos de cada cluster e calculando uma coordenada média entre as interseções conseguidas, conforme figura 1. Diferente de um mapa de calor – outra ferramenta muito interessante para identificar padrões visuais – o Traclus retorna uma trajetória que ainda pode ser trabalhada numericamente, por exemplo, transformada em rota.
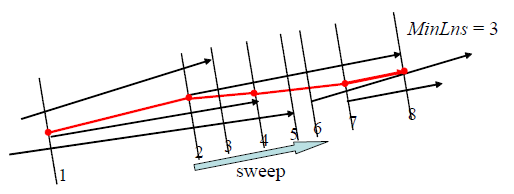
Fig. 1. Um cluster de segmentos é identificado e a trajetória representativa no cluster é calculada varrendo os segmentos no cluster com uma perpendicular a direção média e calculando os pontos médios das interseções desses segmentos com a perpendicular
O TraClus admite dois parâmetros que regulam seu funcionamento: eps ou distância máxima de reunião dos segmentos de um cluster; e minlns ou quantidade mínima de segmentos para formar um cluster. Quanto menor o eps, maior a proximidade exigida dos segmentos para considerá-los solidários no mesmo cluster. Quanto maior o minlns, maior a quantidade de segmentos exigida para caracterizar um cluster.
Outra característica interessante do algoritmo é que ele inicia simplificando as trajetórias de entrada, diminuindo significativamente a quantidade de segmentos que serão analisados, o que o deixa bem rápido, pois ele opera sobre um conjunto de segmentos representativo, mas bem reduzido se comparado ao conjunto de entrada.
A seguir, vamos descrever o uso que fizemos do algoritmo TraClus aplicado sobre os rastros de navios no STAQ, nas seguintes etapas:
1. Busca preliminar de rastros candidatos segundo um critério de interesse
2. Descoberta dos clusters de segmentos de rastros
3. Extração das trajetórias representativas para cada cluster de segmentos de rastros
4. Plotagem das trajetórias representativas sobre a carta
5. Transformação de uma trajetória representativa em rota representativa
6. Estimativa de ETA para um novo navio ao longo da rota representativa
Adotamos o princípio que os melhores resultados serão obtidos na combinação da expertise do analista humano com a capacidade de processamento e descoberta de padrões da automação. Por isso achamos importante que algoritmo já opere sobre uma seleção preliminar de rastros candidatos, de alguma forma, já relacionados a uma categoria de deslocamento sendo estudada (navios atracando no Porto do Rio de Janeiro) e não uma amostra qualquer de rastros.
Iniciamos o roteiro previsto abrindo a janela de Busca de Rastros do STAQ e selecionando rastros que satisfaçam as seguintes condições:
• Navios de grande porte (exclui, por exemplo, os rebocadores)
• Duração máxima do rastro até duas horas
• Posições AIS coletadas durante 8 dias na Baia de Guanabara (16/7 a 27/7/19)
• Rastro inicia com navio entrando na baia (retbg)
• Rastro termina com navio entrando e parando na área do Porto do Rio (areaporto)
Nessa busca, usamos duas áreas auxiliares: uma área retangular maior para marcar a região da baia (retbg) e permitir detectar a entrada na baia, assim como uma outra área circular para permitir detectar a chegada à área do porto (areaporto) conforme ilustrado na figura 2.

Fig. 2. Áreas auxiliares usados na busca de rastros: uma retangular para delimitar entrada na Baia de Guanabara e outra circular já na região do porto
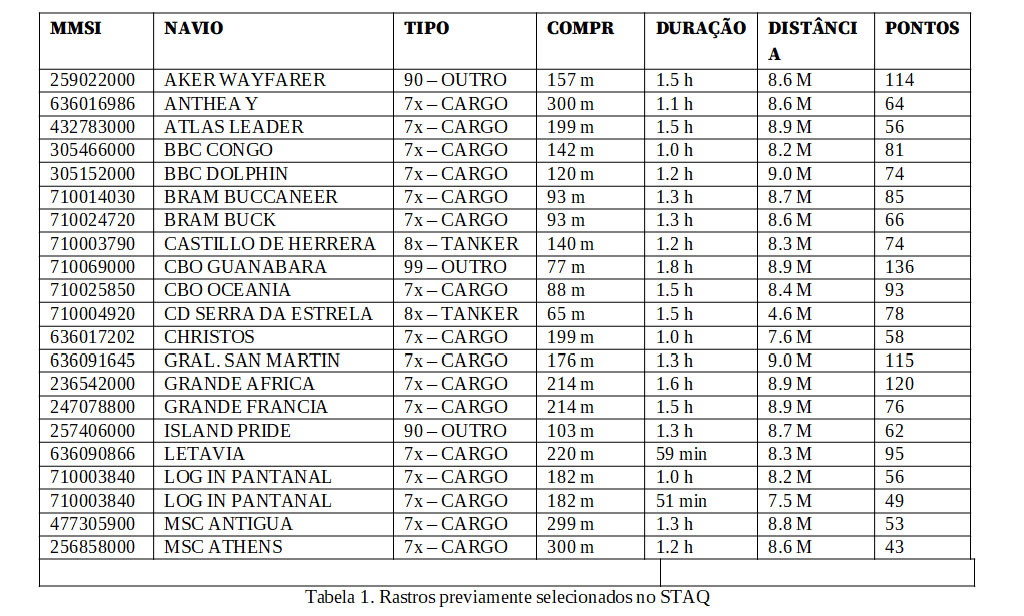
Rodamos a busca preliminar de rastros e encontramos 21 rastros com um total de 1627 segmentos conforme a tabela 1.
Na figura 3, plotamos alguns dos rastros encontrados. Note que entre os rastros plotados, um deles (rastro 7) representa uma outra trajetória bem diversas das demais e foi selecionado porque o navio também entra no retângulo auxiliar mas “por cima” e não representa uma entrada na baia. O STAQ permite descarta-lo previamente.
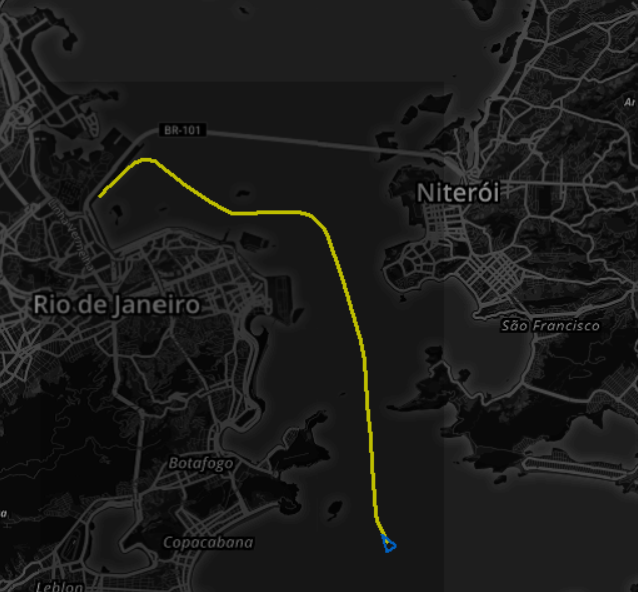
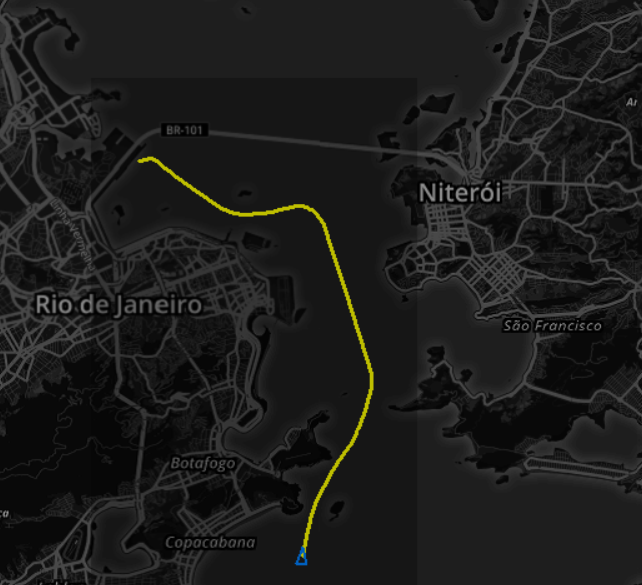
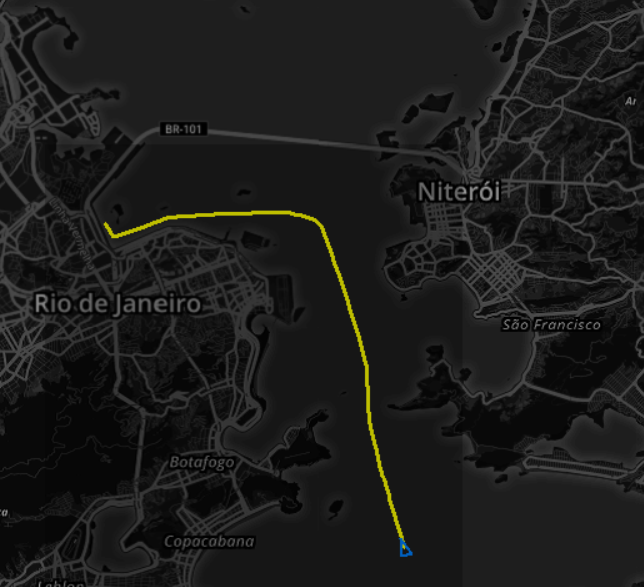
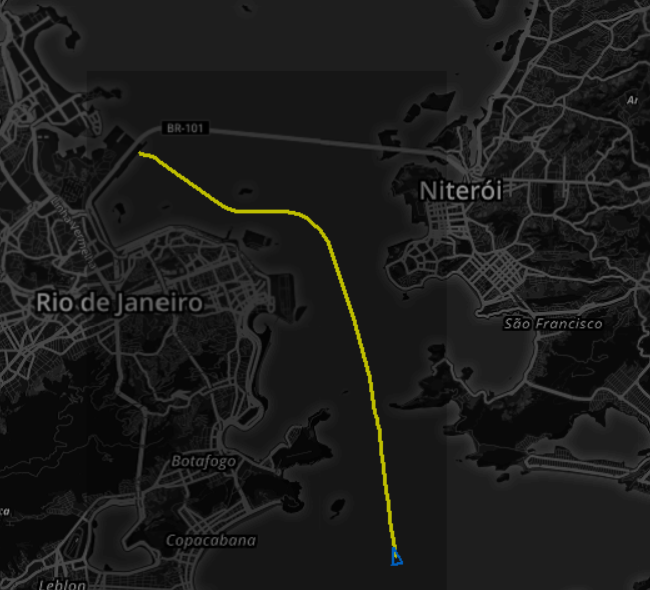
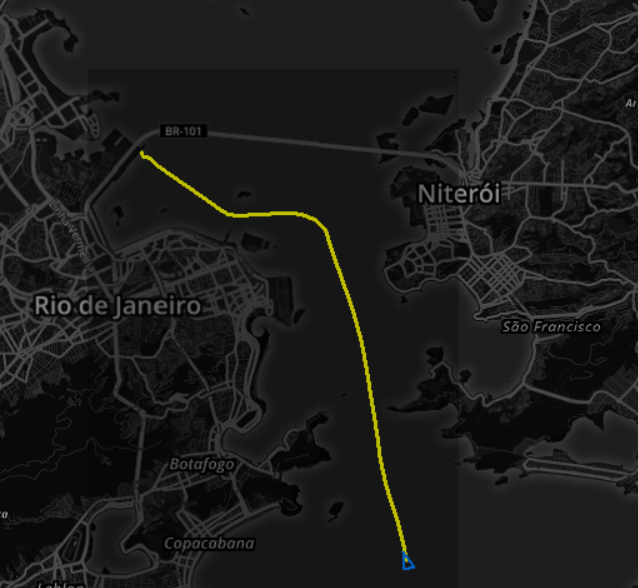


Fig. 3. Alguns rastros encontrados sendo exibidos na carta
Rodamos o TraClus com: eps = 0,4 M (740 metros) e minLns = 10, ou seja, a distância de clusterização como 740 metros e exigimos ao menos 10 segmentos para formar um cluster. A título de comparação a largura da boca da barra, onde a baia é mais estreita e por onde os navios entram e saem, é de aproximadamente 1600 metros, então nossa distância é aproximadamente metade disso.
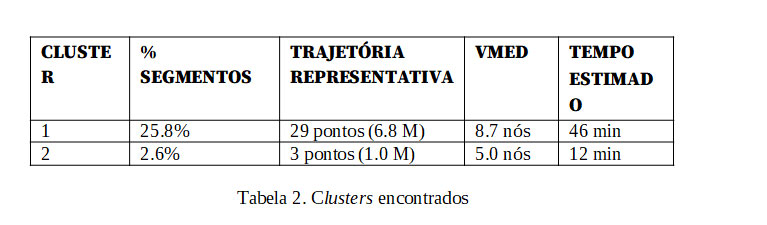
O algoritmo inicia reduzindo as trajetórias dos rastros imputados, ficando com apenas 117 segmentos. Em seguida, identifica dois clusters de segmentos: um contendo 25.8% dos segmentos e o outro com 2.6%. A tabela 2 mostra alguns detalhes dos resultados obtidos.
A figura 4 ilustra as trajetórias representativas calculadas para cada cluster pelo algoritmo.
A trajetória representativa mais longa calculada sobre o primeiro cluster contém 29 pontos e captura o deslocamento dos navios da entrada da baia até o porto. A outra trajetória representativa calculada sobre o segundo cluster captura um “desvio” em relação à primeira que alguns navios fazem, já nas proximidades do porto, em direção a um berço alternativo.

Fig. 4. As duas trajetórias representativas calculadas pelo algoritmo: uma mais longa desde a entrada da baia até o porto. A outra, um desvio já no porto
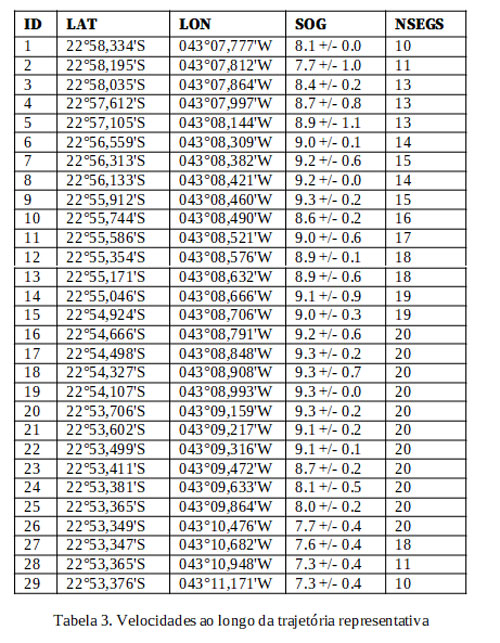
Uma adaptação que julgamos oportuna fazer na implementação do TraClus foi calcular uma velocidade média para cada um dos pontos da trajetória representativa do cluster. Isso foi feito calculando para cada ponto da trajetória representativa a velocidade média dos pontos dos segmentos do cluster usados no cálculo daquele ponto da trajetória.
A tabela 3 mostra as velocidades para cada um dos 29 pontos da trajetória representativa mais longa, incluindo o número de segmentos (de rastros distintos) NSEGS envolvidos para calcular cada ponto. Além da velocidade média incluímos o seu desvio padrão e ele dá uma medida da semelhança dos segmentos de rastro naquele trecho. Os desvios padrão das velocidades estão bem baixos, o que sugere que possamos tomar com boa confiança aquela velocidade como representativa no trecho.
No STAQ, podemos transformar a linha correspondente à trajetória representativa em rota, considerando a velocidade diferenciada ponto a ponto ou usando a velocidade média total da trajetória, ou ainda, usando a velocidade instantânea e atual do navio sendo acompanhado. Nesse último caso, estaríamos aproveitando apenas a informação do formato histórico da trajetória.
Assim que um novo navio, compatível com as condições que usamos para achar a rota representativa, chega na entrada da baia, podemos imaginá-lo navegando na rota representativa e estimar seu ETA de chegada ao porto, conforme janela Rota do Rastreador e ilustrado na figura 5.
Em relação à pertinência de considerar ou não aquele novo navio como seguindo aquela rota representativa encontramos na literatura alguns trabalhos interessantes [5][6] que propõe o cálculo de uma probabilidade dessa pertinência. São cálculos complexos que procuram comparar as posições, velocidades e rumos mais recentes do novo navio com o histórico na região da rota. Usando uma estimação com funções kernel calculam uma probabilidade daquele navio também seguir a rota que os anteriores seguiram. Pretendemos no futuro implementar e investigar essa ideia no STAQ. Por ora, contamos com o expertise do analista para reavaliar periodicamente essa pertinência à medida que o navio prossegue.
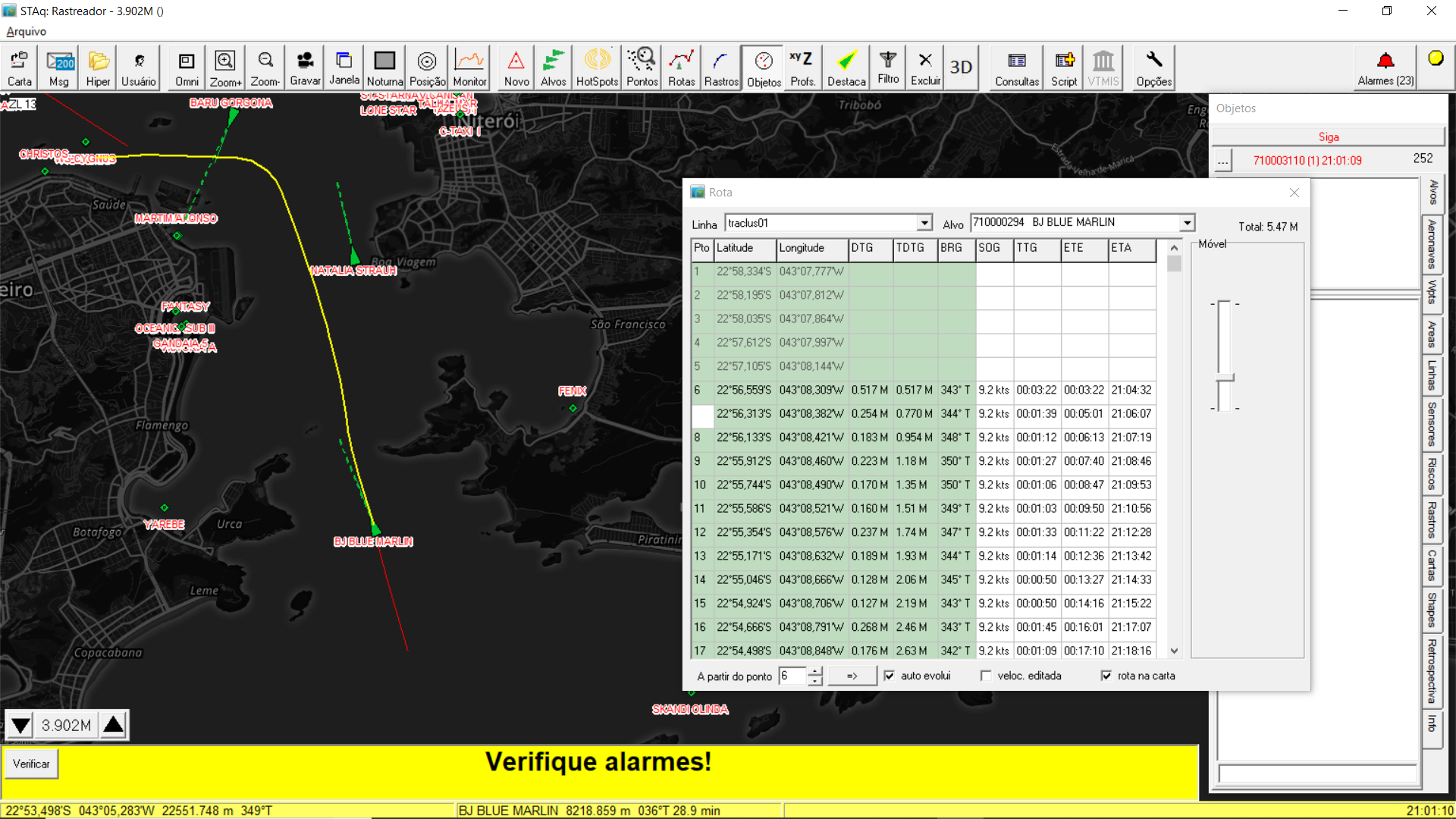
Fig. 5. Acompanhando e estimando chegada de um novo navio através da trajetória representativa transformada em rota no Rastreador
Para melhor entendimento do potencial desse algoritmo, verifiquemos o efeito de variar os parâmetros de entrada, conforme ilustra a figura 6.
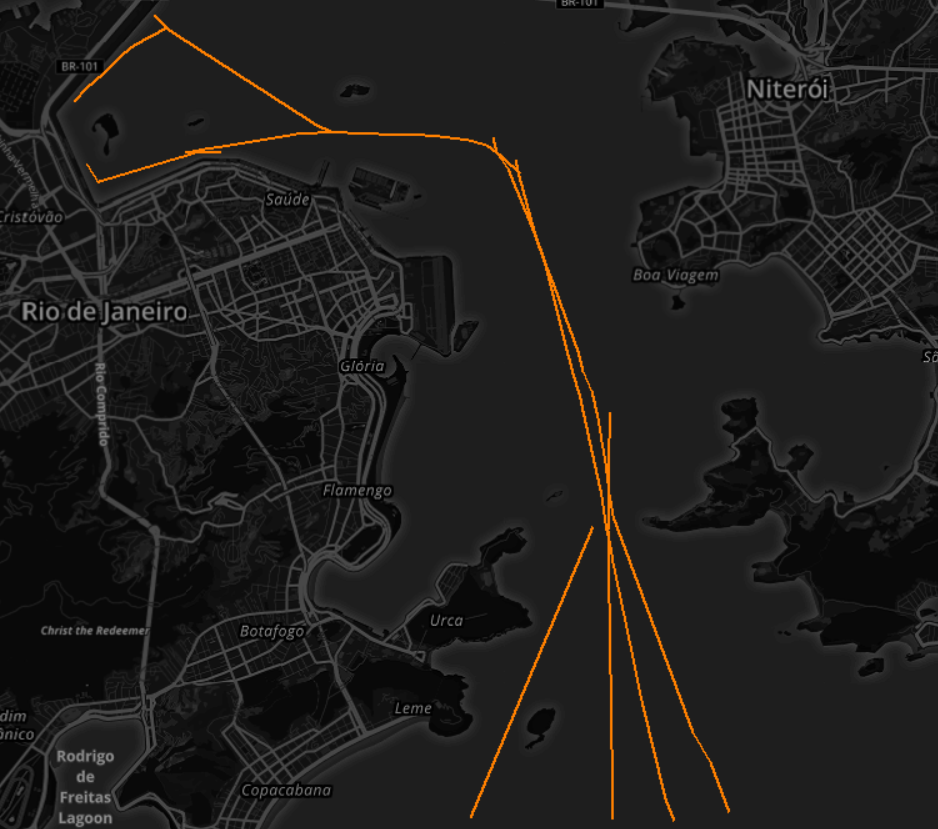
eps = 0,25M (460 m), minlns= 2 segmentos
7 trajetórias
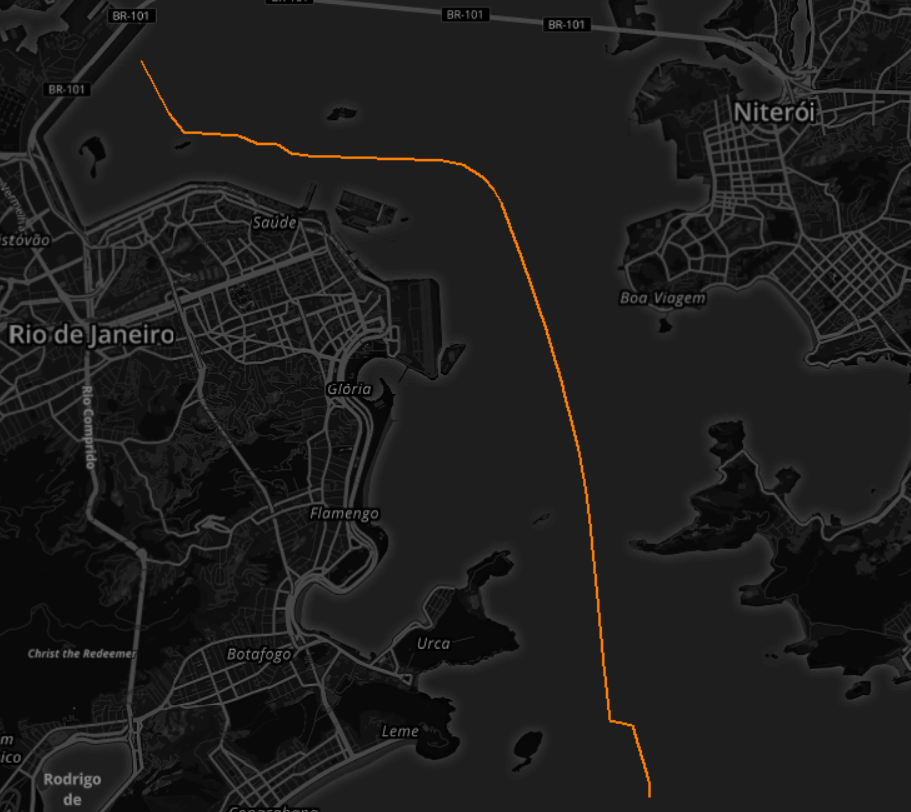
ps = 1 M (1850 m), minlns = 15 segmentos
1 trajetóriaFig. 6. Análise do efeito da variação dos parâmetros
Fig. 6. Análise do efeito da variação dos parâmetros
Em resumo, podemos ajustar esses dois parâmetros conforme a tabela a seguir:

Nesse texto, procuramos avaliar o uso de um algoritmo de trajectory clustering através de um estudo de caso em pequena escala. Acreditamos que com isso conseguimos ilustrar o potencial dessas técnicas como ferramentas para descoberta de padrões que podem ser usados para prever movimentações futuras (e também comportamentos atípicos) dos navios a partir da extensa base coletada de posições AIS e, quem sabe, inspirar outros estudos nessa linha.
Mauricio Peixoto Pacheco da Rocha é Engenheiro de Computação formado pelo Instituto Militar de Engenharia (IME) e Mestre em Engenharia de Sistemas pela COPPE/UFRJ. Engenheiro de software responsável pelo sistema STAQ mauricio.peixoto@hotmail.com
Referências:
[1] Data mining: concepts and techniques, 3rd edition, Morgan-Kaufmann 2011
[2] Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA , 2–4 August 1996; pp. 226–231.
[3] Trajectory Clustering: A Partition-and-Group Framework, Jae-Gil Lee, Jiawei Han and Kyu-Young Whang, SIGMOD´07, June 11-14, 2007, Beijing, China
[4] Extracting Shipping Routing Patterns by Trajectory Clustering Model Based on Automatic Identification System Data, Pan Sheng and Jingbo Yin, Sustenability 2018
[5] R. Laxhammar, G. Falkman, E. Sviestins. Anomaly detection in sea traffic - a comparison of the Gaussian Mixture Model and the Kernel Density Estimator. 12th International Conference on Information Fusion, Seattle, WA, USA, 6-9 July. 2009.
[6] Giuliana Pallotta, Michele Vespe and Karna Bryan. Vessel Pattern Knowledge Discovery from AIS Data: A Framework for Anomaly Detection and Route Prediction. NATO Science and Technology Organization (STO), Centre for Maritime Research and Experimentation (CMRE), Viale San Bartolomeo 400, 19126, La Spezia, Italy







